 您的當(dāng)前位置: 中國(guó)鍛壓網(wǎng) > 資訊中心 > 正文
您的當(dāng)前位置: 中國(guó)鍛壓網(wǎng) > 資訊中心 > 正文|
近年來(lái),隨著智能駕駛的興起,傳統(tǒng)的汽車電子開發(fā)模式已不再適用于智駕的系統(tǒng)開發(fā)場(chǎng)景,基于智能駕駛中間件的開發(fā)模式成為突破口。2023年9月21日,在2023第三屆智能汽車域控制器與中央計(jì)算平臺(tái)創(chuàng)新峰會(huì)上,華玉通軟聯(lián)合創(chuàng)始人兼CTO李堅(jiān)表示,通過(guò)面向智能駕駛芯片以及上層軟件需求開發(fā)的基礎(chǔ)軟件/中間件,可以讓智能駕駛的系統(tǒng)開發(fā)成本得到極大的降低,同時(shí)縮短開發(fā)周期,提高軟件的可靠性。  李堅(jiān) |華玉通軟聯(lián)合創(chuàng)始人兼CTO 以下為演講內(nèi)容整理: 在傳統(tǒng)的汽車電子控制開發(fā)的模式中,使用基于AUTOSAR CP的中間件進(jìn)行開發(fā)已經(jīng)成為行業(yè)中主流的開發(fā)模式。隨著智能駕駛的興起,雖然其在應(yīng)用的需求以及應(yīng)用所使用的技術(shù)和傳統(tǒng)的汽車電子控制是截然不同的兩個(gè)領(lǐng)域,但它的系統(tǒng)規(guī)模更加復(fù)雜。因此在智能駕駛的場(chǎng)景中,基于基礎(chǔ)軟件或者基于中間件的開發(fā)模式仍然是非常必要的。通過(guò)基礎(chǔ)軟件,我們可以讓智能駕駛的系統(tǒng)開發(fā)成本得到極大的降低,縮短開發(fā)周期,提高軟件的可靠性。 面向智能駕駛的基礎(chǔ)軟件/中間件行業(yè)目前仍處于發(fā)展期,技術(shù)壁壘很高。不論是ADAS輔助智能駕駛的應(yīng)用,還是高階自動(dòng)駕駛,系統(tǒng)軟件都是整個(gè)軟件體系架構(gòu)的重要組成,高度關(guān)乎系統(tǒng)的可靠性和安全性。 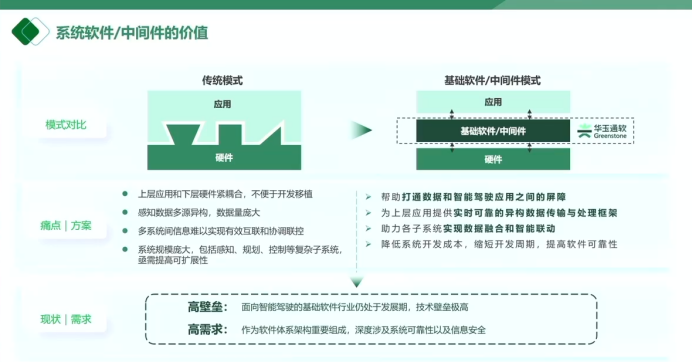 圖源:演講嘉賓素材 正是基于此,華玉通軟致力于面向智能駕駛的基礎(chǔ)軟件研發(fā),目前已經(jīng)推出了完整的面向智能駕駛的基礎(chǔ)軟件系列產(chǎn)品。在和多個(gè)主機(jī)廠、Tier1進(jìn)行量產(chǎn)合作的過(guò)程中,我們也發(fā)現(xiàn)了基礎(chǔ)軟件在量產(chǎn)過(guò)程中出現(xiàn)的一系列挑戰(zhàn),并逐一進(jìn)行了解決。下面將和大家分享我們遇到了怎樣的問(wèn)題,以及在華玉產(chǎn)品中的解決策略。 DDS量產(chǎn)案例 在量產(chǎn)過(guò)程中,從通信、執(zhí)行管理到確定性調(diào)度以及工具鏈?zhǔn)俏覀冊(cè)诖罱ㄖ悄荞{駛系統(tǒng)時(shí)繞不開的話題。用開源的DDS或開源的ROS去搭建demo級(jí)別的自動(dòng)駕駛軟件平臺(tái)所能達(dá)到的系統(tǒng)可靠性以及穩(wěn)定性,與基于華玉基礎(chǔ)軟件去構(gòu)建滿足嚴(yán)苛量產(chǎn)需求的系統(tǒng)化軟件架構(gòu)所能實(shí)現(xiàn)的是截然不同的。 通信層面,例如在ARM A核上,量產(chǎn)過(guò)程中通常會(huì)遇到的問(wèn)題是多個(gè)應(yīng)用、算法帶來(lái)的通信場(chǎng)景復(fù)雜、數(shù)據(jù)收發(fā)節(jié)點(diǎn)多、通信頻次高,數(shù)據(jù)量非常大等挑戰(zhàn)。用成本很高的大算力芯片去解決這些問(wèn)題是目前常用的方式。但隨著智能駕駛系統(tǒng)普及的需求越來(lái)越高,車企都希望能使用低成本的芯片構(gòu)建自動(dòng)駕駛系統(tǒng),將CPU的性能盡可能充分利用,以將CPU用滿為目標(biāo)來(lái)做資源分配。那么如何在高系統(tǒng)負(fù)載下保證通信的低延遲抖動(dòng)就成為了非常重要的問(wèn)題。同時(shí),在這樣一個(gè)復(fù)雜的通信場(chǎng)景下,不同節(jié)點(diǎn)對(duì)于通信性能和通信場(chǎng)景的需求是不同的。華玉通信中間件可以通過(guò)非常簡(jiǎn)單的QoS配置,來(lái)滿足客戶復(fù)雜多變的通信場(chǎng)景需求。此外,SoC的資源非常豐富,有多種底層通信channel,如何根據(jù)不同應(yīng)用需求(進(jìn)程內(nèi)/進(jìn)程間/核間/芯片間/域間)選擇效率最高的channel,也是華玉通信中間件能夠幫客戶解決的實(shí)際問(wèn)題。在通信過(guò)程中,華玉通信中間件可以提供完整的通信診斷支持,幫助用戶快速定位與通信相關(guān)的故障所在。 下面是我們?cè)诤湍砊ier1量產(chǎn)項(xiàng)目中的實(shí)際通信場(chǎng)景。在TDA4和J5之間,TDA4的A核和R核之間要做大量的數(shù)據(jù)交互。  圖源:演講嘉賓素材 TDA4的A核上要發(fā)布的topic數(shù)量為56個(gè),要接收來(lái)自A核數(shù)據(jù)的節(jié)點(diǎn)的數(shù)量為105個(gè),接收來(lái)自R核數(shù)據(jù)的節(jié)點(diǎn)為8個(gè)。通信的頻次是為25赫茲、50赫茲、100赫茲。通信數(shù)據(jù)包的平均大小從30字節(jié)到3M字節(jié)不等,平均每秒要收發(fā)的數(shù)據(jù)包數(shù)量是6000個(gè),每秒鐘吞吐量為500M字節(jié)。這種復(fù)雜的場(chǎng)景如果不依賴通信中間件,要從底層直接實(shí)現(xiàn)一個(gè)車規(guī)級(jí)通信的框架是很困難的,并且需要消耗大量的人力、物力和時(shí)間成本。 在這個(gè)復(fù)雜通信場(chǎng)景下,我們使用華玉SWIFT DDS實(shí)現(xiàn)了數(shù)據(jù)互通。在J5及TDA4的A核/R核上都部署了SWIFT DDS,所有的通信都通過(guò)SWIFT DDS完成,并且可以根據(jù)應(yīng)用的部署位置及需求來(lái)選擇最優(yōu)的通訊方式。 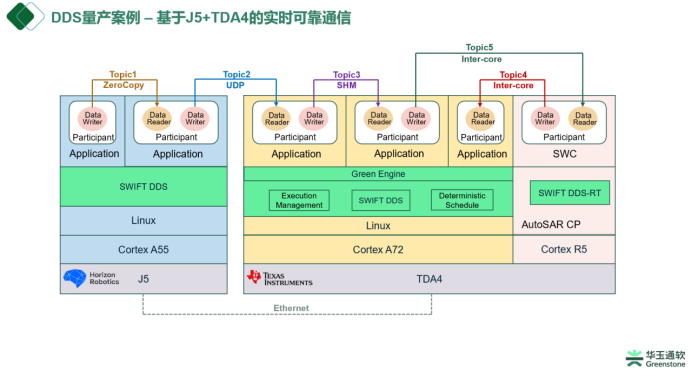 圖源:演講嘉賓素材 另一個(gè)案例是一個(gè)雙Orin加雙TC397的架構(gòu)。在所有的芯片上同樣是通過(guò)SWIFT DDS來(lái)打通所有的通信鏈路。這里面有一顆Orin還會(huì)運(yùn)行一些車云的相關(guān)應(yīng)用,可以用擴(kuò)展的DDS協(xié)議,包括DDS-SECURITY、DDS-RPC和DDS-WEB,幫助客戶方便快捷的直接打通車端和云端的連接并且滿足車端和云端通信的特定需求。在這樣的場(chǎng)景下,使用同一華玉的通信中間件就可以把車內(nèi)通信、車間通信以及車云通信全部統(tǒng)一起來(lái)。 在這個(gè)案例中,為何客戶選擇了SWIFT DDS而不是其他方案?首先,SWIFT DDS可以實(shí)現(xiàn)對(duì)復(fù)雜場(chǎng)景的支持。通過(guò)其他方式也可以將通信場(chǎng)景搭建起來(lái),但通信過(guò)程中,其他的搭建方式無(wú)法滿足除通信本身之外的功能以及性能的需求。而SWIFT DDS則可以通過(guò)DDS的配置工具輕松實(shí)現(xiàn)復(fù)雜場(chǎng)景下的通信功能及性能需求。 其次,SWIFT DDS有多種高性能通信的支持。例如在TDA4 A核R核通信中,SWIFT DDS會(huì)自動(dòng)切換底層channel使用效率更高的RPMessage進(jìn)行通信。 第三是對(duì)于通信延遲抖動(dòng)的控制。量產(chǎn)過(guò)程中,A核需要運(yùn)行數(shù)十個(gè)甚至上百個(gè)進(jìn)程,這些進(jìn)程都有自己的周期。一旦通信發(fā)生抖動(dòng),這個(gè)抖動(dòng)是不可控制的。比如用Some/IP,普通抖動(dòng)的平均值可能是5毫秒,但如果它在一段時(shí)間內(nèi)抖動(dòng)的最大值能達(dá)到幾百毫秒甚至秒的量級(jí),對(duì)于時(shí)序要求非常嚴(yán)格的上層應(yīng)用來(lái)說(shuō),是沒(méi)有辦法使用的。因此SWIFT DDS提供支持確定性調(diào)度的接口,針對(duì)前面所提到的抖動(dòng)問(wèn)題做了深度的優(yōu)化。 最后是對(duì)于診斷和多種通信QoS的支持。SWIFT DDS針對(duì)智能駕駛汽車的場(chǎng)景或做了非常多的優(yōu)化和改進(jìn),而其他幾種方案是沒(méi)有這些功能的。  圖源:演講嘉賓素材 量產(chǎn)過(guò)程中的執(zhí)行和狀態(tài)管理 SoC上運(yùn)行了非常多的進(jìn)程,這些進(jìn)程之間有各自的依賴關(guān)系。大部分公司是按模塊開發(fā),最后將模塊放在一起拼成一個(gè)系統(tǒng)。在這個(gè)過(guò)程中,程序以怎樣的形式部署到硬件上?怎樣開始運(yùn)行和結(jié)束?這當(dāng)中并沒(méi)有統(tǒng)一的框架進(jìn)行規(guī)定。 對(duì)于狀態(tài)管理而言,在量產(chǎn)過(guò)程中必須要有一個(gè)統(tǒng)一的框架,比如相關(guān)的二進(jìn)制文件。對(duì)于依賴庫(kù),對(duì)于運(yùn)行的參數(shù)進(jìn)行統(tǒng)一的管理和配置。同時(shí),對(duì)于應(yīng)用要進(jìn)行統(tǒng)一的部署,進(jìn)行OTA的升級(jí)等,也都必須在一個(gè)獨(dú)立的統(tǒng)一框架下完成才能以最高的效率實(shí)現(xiàn)。 另外,我們的執(zhí)行和狀態(tài)管理要做到進(jìn)程和資源的隔離,保證A核上運(yùn)行的多個(gè)進(jìn)程一旦有崩潰的,不會(huì)影響其他進(jìn)程。 針對(duì)這些挑戰(zhàn),我們開發(fā)了“云雀”執(zhí)行管理中間件,在量產(chǎn)過(guò)程中使用我們的中間件可以將應(yīng)用程序的配置、開發(fā)、部署、運(yùn)行,以及OTA統(tǒng)一到一個(gè)框架下來(lái)進(jìn)行。 從應(yīng)用程序的生命周期管理和狀態(tài)管理而言,通過(guò)“云雀”執(zhí)行管理中間件,可以和上層業(yè)務(wù)進(jìn)行解耦。用戶在只有system design(所有模塊節(jié)點(diǎn)的框圖以及節(jié)點(diǎn)之間數(shù)據(jù)流圖),還沒(méi)有實(shí)際的業(yè)務(wù)代碼之前,就可以根據(jù)這些信息把程序生命周期管理和狀態(tài)管理全部實(shí)現(xiàn),而不依賴于實(shí)際的算法實(shí)現(xiàn)。而如果在應(yīng)用里把這些功能實(shí)踐出來(lái),造成的結(jié)果就是狀態(tài)管理、執(zhí)行管理本身會(huì)和上層業(yè)務(wù)有嚴(yán)重的耦合,會(huì)非常難以調(diào)試,以及后續(xù)擴(kuò)展困難。 對(duì)于部署和OTA來(lái)說(shuō),“云雀”執(zhí)行管理中間件把程序的部署和OTA一并放到執(zhí)行管理框架下,只要用同樣一個(gè)框架就可以實(shí)現(xiàn)程序開發(fā)、部署、執(zhí)行、OTA,所有相關(guān)的東西都在同一個(gè)框架下實(shí)現(xiàn),高度保證其連續(xù)性和一致性。  圖源:演講嘉賓素材 我們在量產(chǎn)中面臨的另一挑戰(zhàn)是確定性執(zhí)行。Linux的調(diào)度機(jī)制是盡最大的能力去做調(diào)度,但不會(huì)保證程序在確定的時(shí)間內(nèi)執(zhí)行完畢,而目前在A核上運(yùn)行的很多智能駕駛算法是有明確的截止時(shí)間和周期要求的。一旦某個(gè)程序的執(zhí)行時(shí)間不確定,就會(huì)造成整個(gè)系統(tǒng)狀態(tài)陷入混亂。這個(gè)過(guò)程中整個(gè)系統(tǒng)不僅在節(jié)點(diǎn)上進(jìn)行計(jì)算、處理業(yè)務(wù)邏輯,節(jié)點(diǎn)和節(jié)點(diǎn)之間還要做通信,通信本身也會(huì)帶來(lái)不確定性。 有人提出用TSN解決這個(gè)問(wèn)題,TSN解決的是硬件層面確定性的數(shù)據(jù)傳輸,但如果用戶不愿意在數(shù)據(jù)鏈路層使用TSN做傳輸,而在傳輸層使用UDP做數(shù)據(jù)傳輸,從鏈路層到傳輸層的數(shù)據(jù)處理過(guò)程中,kernel會(huì)帶來(lái)新的不確定性。因此,確定性的執(zhí)行必須解決通信過(guò)程中數(shù)據(jù)從用戶進(jìn)程發(fā)送到用戶進(jìn)程接收的端到端確定性通信問(wèn)題。針對(duì)這一挑戰(zhàn),我們對(duì)用戶空間到內(nèi)核空間數(shù)據(jù)全鏈路的收發(fā)流程做了細(xì)致的研究、分析以及優(yōu)化,推出了華玉確定性版本的全鏈路通信。 通過(guò)華玉確定性執(zhí)行模塊,用戶只需要把任務(wù)相關(guān)信息輸入到確定性調(diào)度generator里,產(chǎn)生確定性調(diào)度的方案之后,再通過(guò)確定性調(diào)度的runtime,把確定性調(diào)度方案實(shí)現(xiàn)出來(lái),就可以實(shí)現(xiàn)跨芯片的全局確定性調(diào)度。 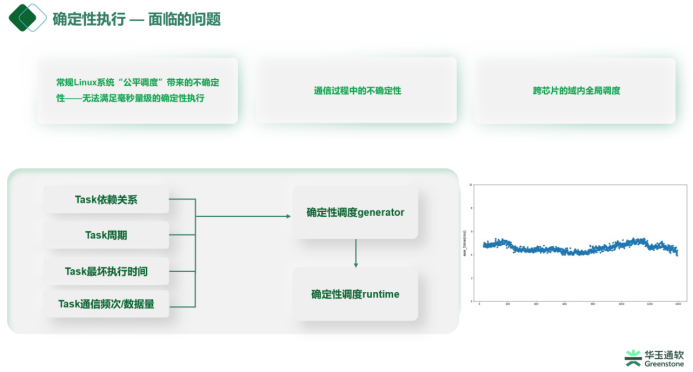 圖源:演講嘉賓素材 量產(chǎn)過(guò)程中的工具鏈需求 對(duì)于傳統(tǒng)的MCU或者AUTOSAR CP的開發(fā),相應(yīng)的中間件廠商都提供了一套完整的工具鏈。但我們?cè)贏核上開發(fā)智能駕駛應(yīng)用的時(shí)候,相應(yīng)的工具鏈?zhǔn)欠浅I俚摹T?/strong>Linux上做開發(fā)一般都是通過(guò)API接口調(diào)用,需要一定量的程序開發(fā)工作把應(yīng)用和底層的中間件使用glue code黏合到一起。另外,上層業(yè)務(wù)的數(shù)據(jù)流是抽象的算法層面的東西,如何把算法層面比如發(fā)送數(shù)據(jù)的類型映射到中間件數(shù)據(jù)類型上也需要一定的工作量。 通常開發(fā)過(guò)程中的V字模型全流程的閉環(huán),包括分析,設(shè)計(jì),開發(fā),測(cè)試,部署和維護(hù),V字型的流程對(duì)于現(xiàn)在汽車電子面向智能駕駛的系統(tǒng)軟件是非常缺失的。 而針對(duì)V字模型開發(fā)中的每一個(gè)環(huán)節(jié),華玉都有對(duì)應(yīng)的工具來(lái)幫大家完成這些任務(wù)。比如我們的System Configurator和Code Generator針對(duì)用戶可以使用配置的方式來(lái)實(shí)現(xiàn)它想要的DDS的通信場(chǎng)景。Monitor可以讓用戶在做DDS測(cè)試和調(diào)試時(shí)直接獲取DDS實(shí)時(shí)通信狀態(tài)。DDS-Recorder、DDS-Replayer可以讓用戶在實(shí)驗(yàn)室環(huán)境回放錄制的DDS數(shù)據(jù),方便用戶進(jìn)行通信調(diào)試。 Green Engine是華玉推出的自動(dòng)化集成工具。通過(guò)Green Engine,用戶僅需提供上層算法就可以完成整個(gè)智能駕駛應(yīng)用的集成。Green Engine替代了用戶手動(dòng)去集成核心系統(tǒng)軟件模塊的工作。用戶只需要提供系統(tǒng)節(jié)點(diǎn)之間的框圖以及數(shù)據(jù)流的關(guān)系圖和擬采用的算法,再使用Green Engine SDK進(jìn)行處理,就可以生成能直接運(yùn)行的、基于車規(guī)級(jí)中間件搭建的智能駕駛應(yīng)用。這樣一來(lái),用戶可以只專注于智能駕駛應(yīng)用程序的業(yè)務(wù)本身,而底層的數(shù)據(jù)通信、計(jì)算調(diào)度、執(zhí)行管理等均由Green Engine做綜合和集成,從而實(shí)現(xiàn)智能駕駛系統(tǒng)的快速構(gòu)建及部署。 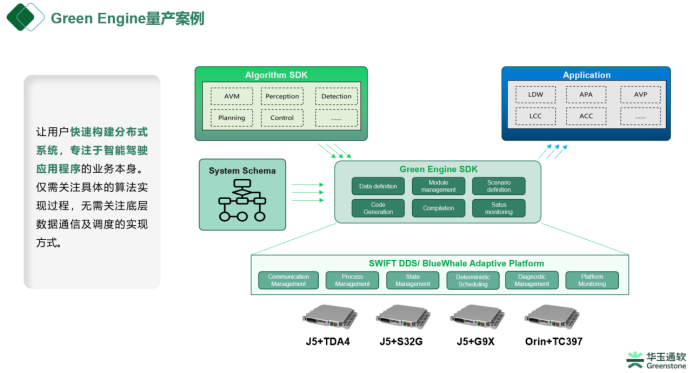 圖源:演講嘉賓素材 中間件與SOA架構(gòu)密不可分,目前SOA的底層基礎(chǔ)架構(gòu)功能基本全部通過(guò)中間件進(jìn)行搭建。雖然SOA可以降低應(yīng)用、節(jié)點(diǎn)之間的耦合,但是其中還帶來(lái)了不小的開發(fā)集成工作。比如直接使用第三方的中間件會(huì)有較高的配置復(fù)雜度。一個(gè)量產(chǎn)項(xiàng)目中車企可能會(huì)用到多個(gè)中間件供應(yīng)商,需要協(xié)調(diào)多個(gè)供應(yīng)商進(jìn)行溝通和對(duì)接,過(guò)程中會(huì)花費(fèi)大量的時(shí)間/人力成本,導(dǎo)致最后的集成變得非常復(fù)雜且不可控。 使用華玉Green Engine進(jìn)行開發(fā)集成,因?yàn)?/strong>所有中間件都是華玉自研,并且可以涵蓋用戶上層應(yīng)用的全部底層需求,所以用戶只需要提供算法,就可以方便快捷地實(shí)現(xiàn)量產(chǎn)級(jí)別的智能駕駛軟件系統(tǒng)。 (以上內(nèi)容來(lái)自華玉通軟聯(lián)合創(chuàng)始人兼CTO李堅(jiān)于2023年9月21日-22日在2023第三屆智能汽車域控制器與中央計(jì)算平臺(tái)創(chuàng)新峰會(huì)發(fā)表的《全場(chǎng)景車規(guī)芯片助力跨域融合》主題演講。) |
 |
中國(guó)鍛壓網(wǎng)官方微信:掃一掃,立即關(guān)注!
關(guān)注"中國(guó)鍛壓網(wǎng)",獲取獨(dú)家行業(yè)新聞資訊。 添加方法1: 在“添加好友”中直接添加微信賬號(hào):chinaforge 添加方法2: 微信中掃描左側(cè)的二維碼 |





