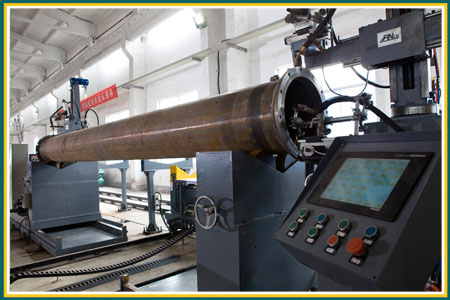
�aƷ��ͣ� FIN--����--�F�����س��ӹ��O��
�aƷ��̖���Уף�������
1 �⺸�p���ӆ�Ԫ��
1.1��ۙ�b�ã��Cе�Y�������b�ڴ�ֱ���������ϣ�늙C�ӣ�ʹ�L݆ͬ�r���ڹܵ�����棬�S�ܵ��D�ӕr�r�N�o�����ӆ�Ԫ�S�����Ԅ������{�����a���ܵ��ęE�A���μ��������ӌ����ӵ�Ӱ푡�
1.2�[���b�ã����Ӡ�B�£����F�����Ĕ[�Ӻ�����Ҫ�����Ɣ[�әC���Ĕ[�l���[�������ҡ����g��ͣ���r�g�������S���O�����P������������ֹͣ�r��ʹ�[���b���Ԅӻص����������gλ�ã��Ա���һ�����ĺ��ӡ����ӕr���c���C����ϣ���ʩ���[�Ӻ��Ӻ͔[�Ӻ��ӵij����ГQ��������Ӻ��ӵIJ�ͬ�[�Ӆ���Ҳ�ɰ������M���Ԅ��ГQ���ԝM�㌍�H���ӵ���Ҫ��
�ڷǺ��Ӡ�B�£�ͨ�^�|�����ϵİ��o���Ɍ������Qֱ���S�������M���{�����M�㲻ͬ���Ĺ������ӡ�
1.3�����{���C��
�����ɶ��B�U�M�ɣ����Ᵽ�����M�нǶȺ�λ���{�����M���Ӻ͌��Ӻ��p���ӵ���Ҫ��
2 �Ⱥ��p���ӆ�Ԫ
�Ⱥ��p���ӆ�Ԫ�ֳ����ײ��֡�
2.1�z�yϵ�y���ɃɽMֱ��λ�ƙz�yԪ���M�ɣ�����ӱ��C����ęz�y��������һ�������ṩ���_�Ĕ������z�y�Ŀ���m�����c���Ӷ�����x�����m�ȱ����c�����������x��
2.2�[�Ӻ����b�ã���ʮ��늄ӻ���M�ɣ��L��z���cֱ���L���S�нM�ɵĂ��әC�����o��ϵ�����ȸߣ��ɲ��M늙C�ӣ������z�y�Ĕ����M�Д[�Ӻϳɣ�ʹ����܉�E�M�㺸�p�ĺ���Ҫ��
2.3���D׃λ�b�ã�ʹ�Ú�ӓu�U�C��ʹ�����_���D90º�����ГQ�����c�z�y�C�������D�Ƕ��ɓ��K�����؏Ͷ�λ���ȸߡ�
2.4��ۙ�b�ã�ʹ�Ú�ӻ���C��ʹ���ӆ�Ԫ�c�������֕r�r�o�N��B���麸���c�z�y�ṩ�yһ���c���a����������λ�õ�ƫ�
2.5���Ӻ��ӕr���ڌ��ӽ��^�M�㹤ˇ����r�£��{�������ĊA��λ�ã�ʹ�������ʺ��pλ�ã�ͨ�^�[���b��С�[�������l�ʵĔ[�ӿɌ��F�ԄӴ���ӡ�
3 �C�^���ߙC��
ԓ�C�������Þ麸����ɺ�������������λ�ã����ϵ�y�ӣ�������ӣ�����ƽ������䓹܌��F�Ԅ��������ṩ���g��
4 �ӆ�Ԫ
�ӆ�Ԫؓ؟���������^���е����D���ɽ����ŷ�늙C�ӡ��{�ٷ����V���M�㲻ֱͬ��䓹ܺ�����Ҫ�������_��ӛ�䓹����Dλ�ã����ԓλ�õęz�y�����{�������Ĕ[����ʹ���p�������^��
���_ʽ�L݆�ܽY����������ֱ��׃���r����݆���g����M���{����
5 �����b��
����늙C�ӣ��X݆�X�l�����ӣ�ֱ���L�ӌ�܉��λ���ƄӾ��ȸ����`�܇�w�����ƴ���Y�������ȸߡ�
���ƴ�����Ʉ��ȸߣ������w���b�ػ����AҪ��ͣ����s���A��ʩ���ɱ������c�{���_�����w���b��ˮƽ�ȣ���܉���c���w�������Ӻ�һ��ӹ������C���߾��ȡ�
7 ��朷��oϵ�y
��_��С܇�����^���о�·형������C�����朷��oϵ�y����ϵ�y�\�������ͣ�ʹ�É����L��